FIRST Robotics Team 1360
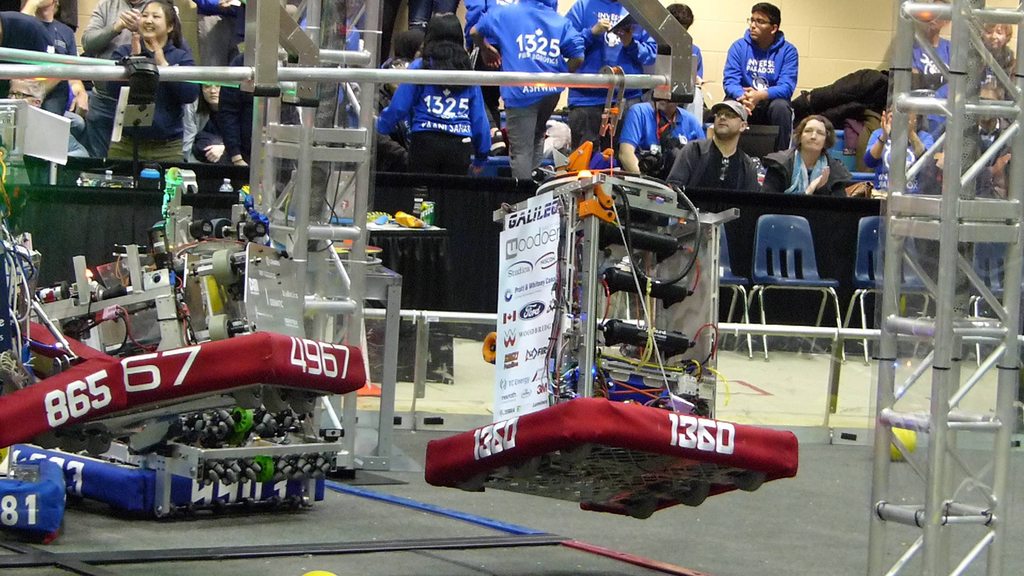
Orbit Robotics is a community robotics team. We design, fabricate and program a new 125lbs robot for the FIRST robotics competition every year all within 6 weeks. I had the opportunity to work on the robot Orion and had the awesome chance to lead the design for the robot Galileo.
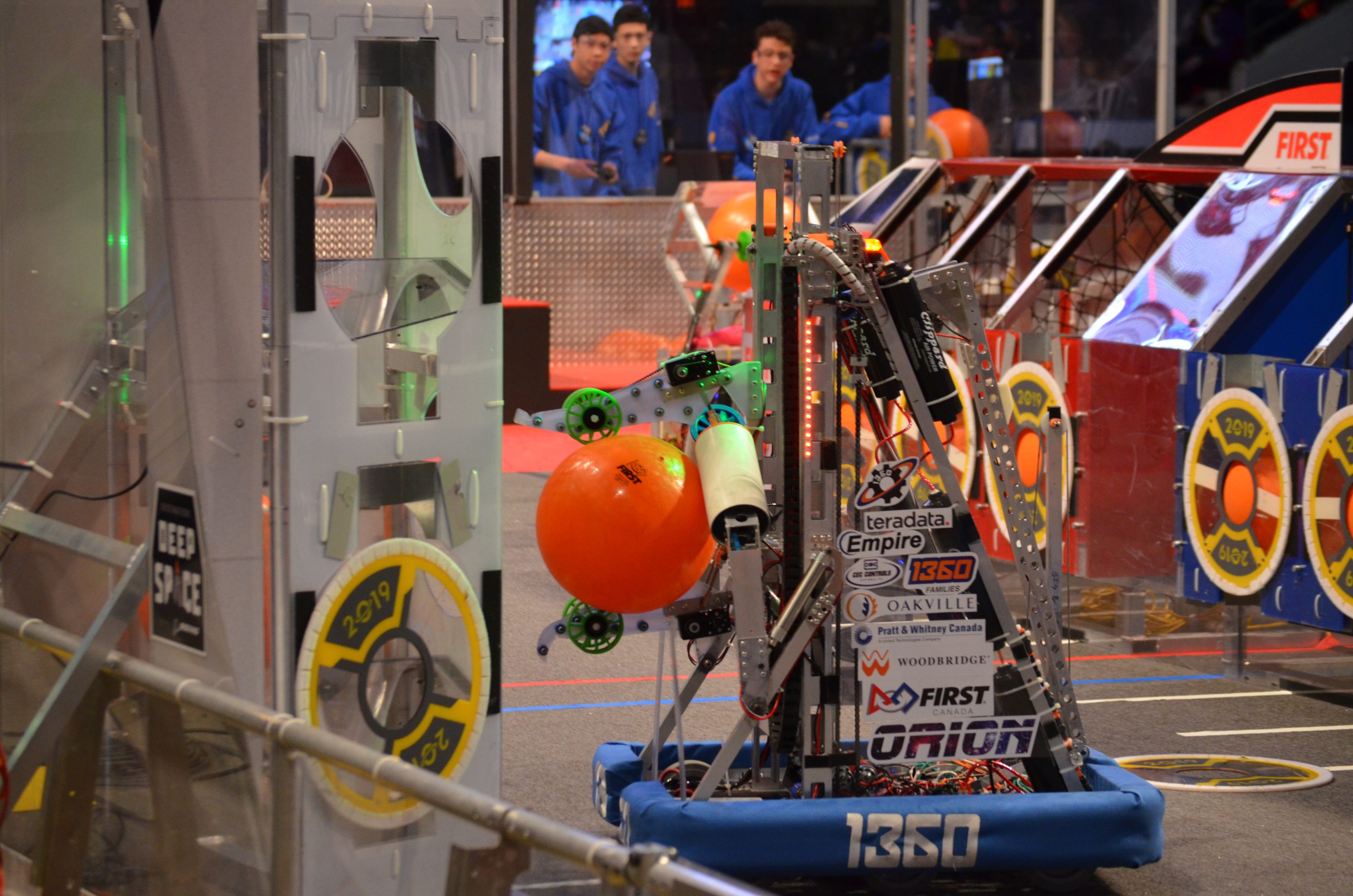

We use Solidworks through the 6 weeks from prototyping, designing, and manufacturing to marketing. This video was made for Ford to demonstrate how our team uses Solidworks as a potential sponsor, but it also nicely outlines how the design process works.
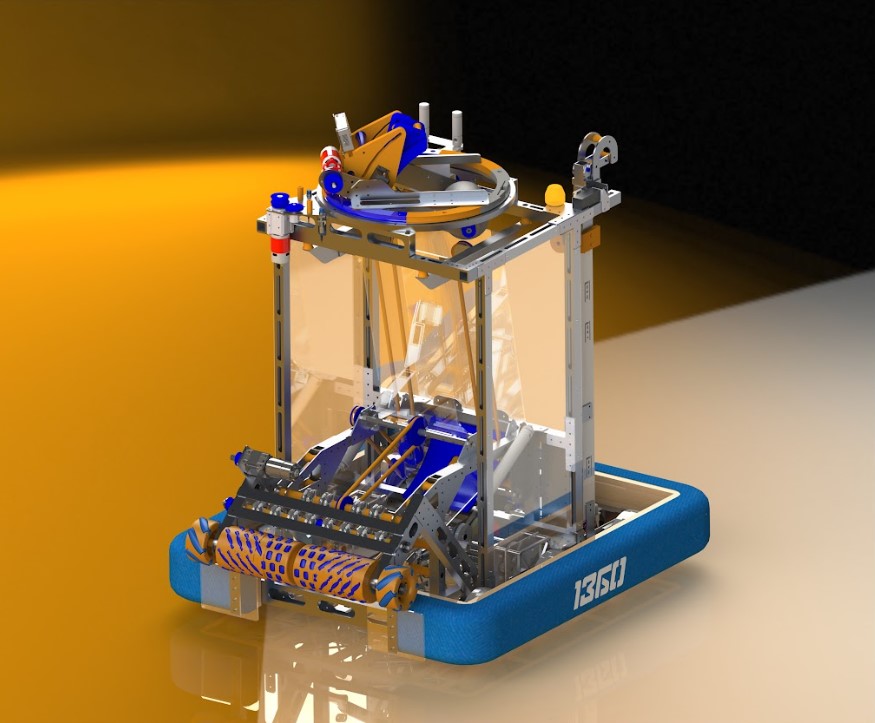
Galileo
- FIRST Innovation Challenge Semi-Finalist Award
- Georgian College Semi-Finalist
- 4.5m/s top speed
- Vision guided, auto trajectory control turret up to 40’ in range in 330°
- Autonomous pathing, ball intaking, and shooting within the first 15 seconds
- 6’ vertical climb able to support up to 300lbs
- Omni-wheel ball intake with passive ball center feature
- Store up to 5 balls with precision indexing
- 125 lbs 28"x38"x60"
After prototypes and design. We build and assemble all in house. Mill, drill press, lathe, bandsaw, and 3D printers are some common tools we use for our components.


Overview Contributions
- Lead the design and organized workflow of the full robot design
- Taught over 50+ highschool students Solidworks
- Full design of the Superstructure
- Full design of the Climbing System
- Full design of the Drivetrain
- Full design of the Turret
- Provided aid to indexing system, intake system, and shooter system

Superstructure Personal Contributions
- Designed box tubes, gussets, polycarbs, 3D-printed pulleys and spacers
- Acts as a frame and mounting point for other subassemblies
- Mainly consists of aluminum box tubes and polycarbonates. Fastened with rivets
- Holds and indexes 5 balls
- Precisely feed balls individually to the shooter
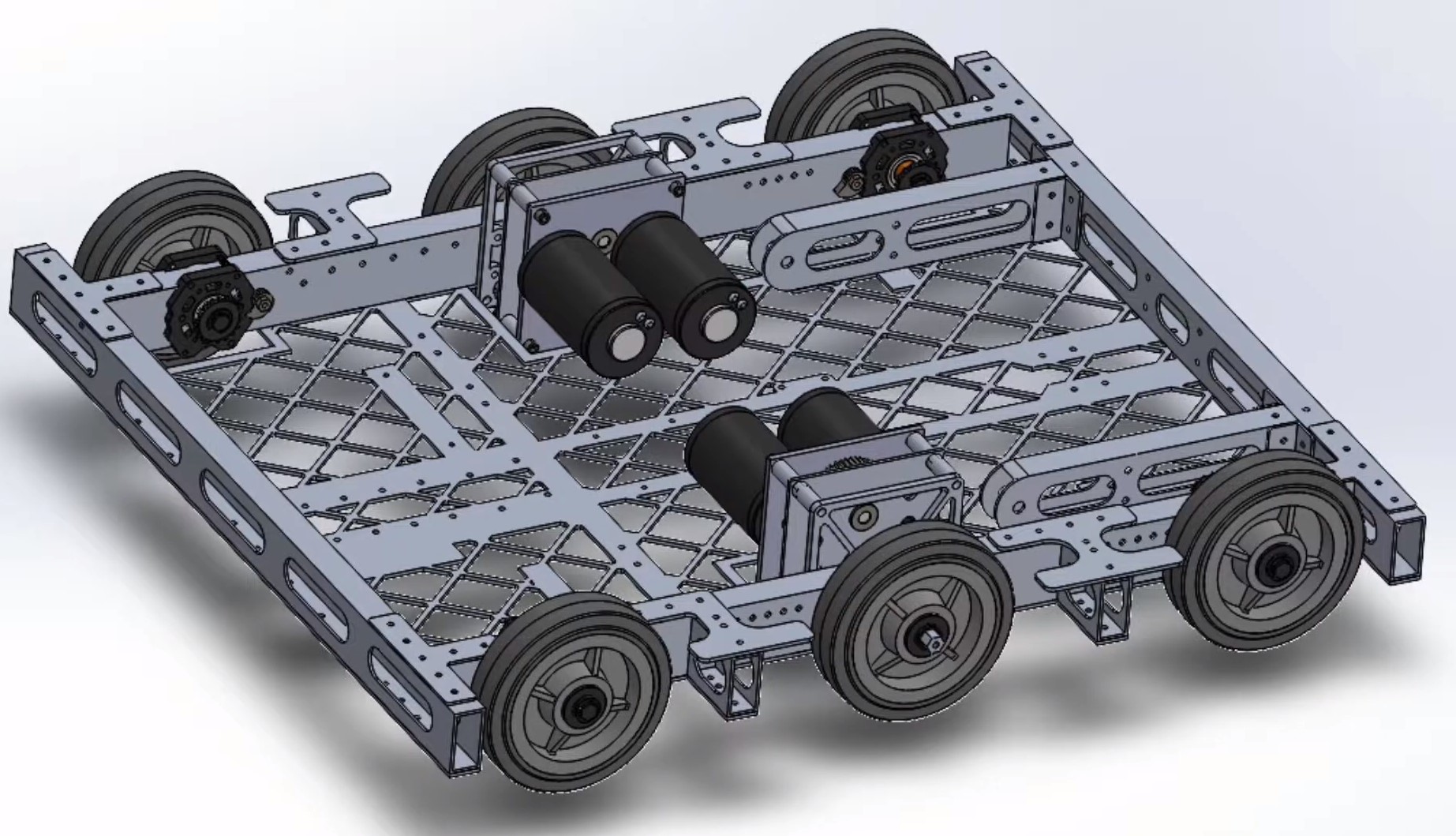
Drivetrain Personal Contributions
- Designed 6 wheels tank drive with center wheel drop to reduce friction when turning
- Designed Lightweight waterjet belly pan for weight optimization
- Driven with 4 lightweight NEO brushless motors
- Designed and calculated gearbox with 9.87:1 gear ratio
- Mounting space for pneumatic and electrical systems
- 4.5m/s top speed

Climber/Winch Personal Contributions
- Designed and calculated winch gearbox with 775 Pro motors
- Simple detachable hook to winch climber
- Designed self-locking worm gear design
- Designed dual-stage extension up for a 40” reach
- Designed Passive extension driven by constant force springs and winch system
- Uses commerical 28" drawer slides
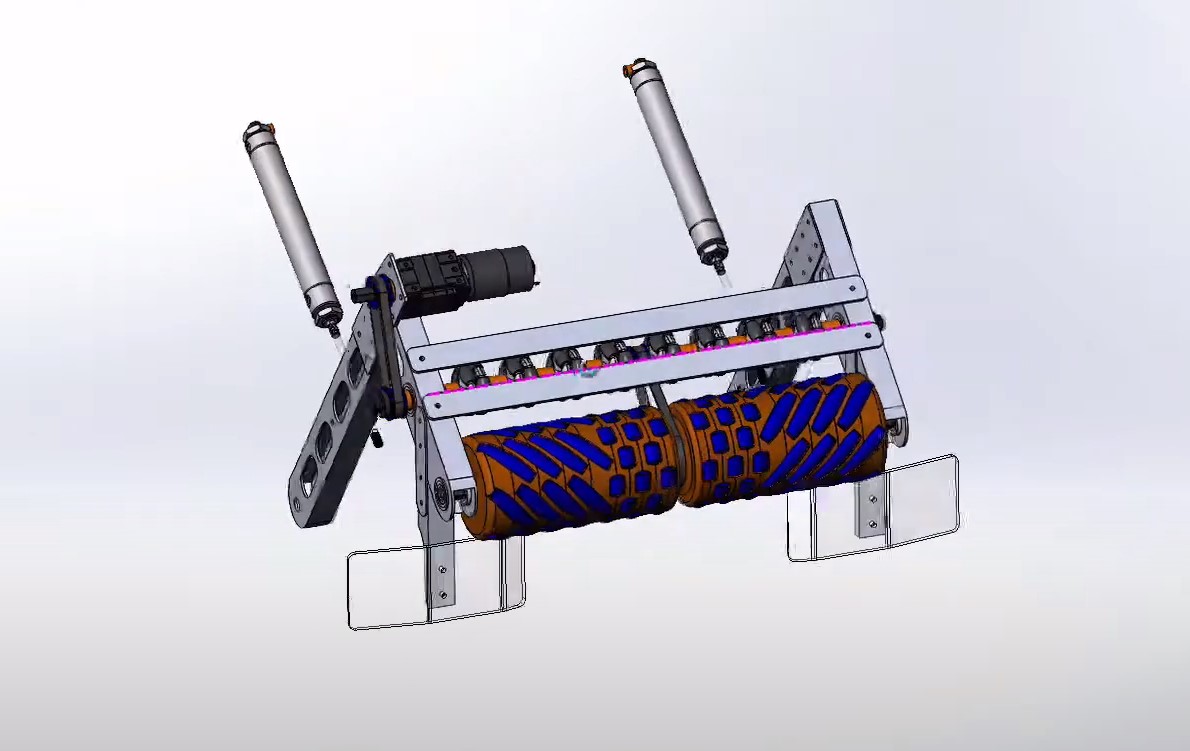
Ball Intake Personal Contributions
- Aided with Prototyping and power transmission design
- Uses custom mecanum wheels to automatically center balls into the indexer
- Pneumatic-activated retractable design
- Timing pulley for power transmission
- Driven with 775 Pros motor
- Aluminum box tubes, gussets, and rivet construction
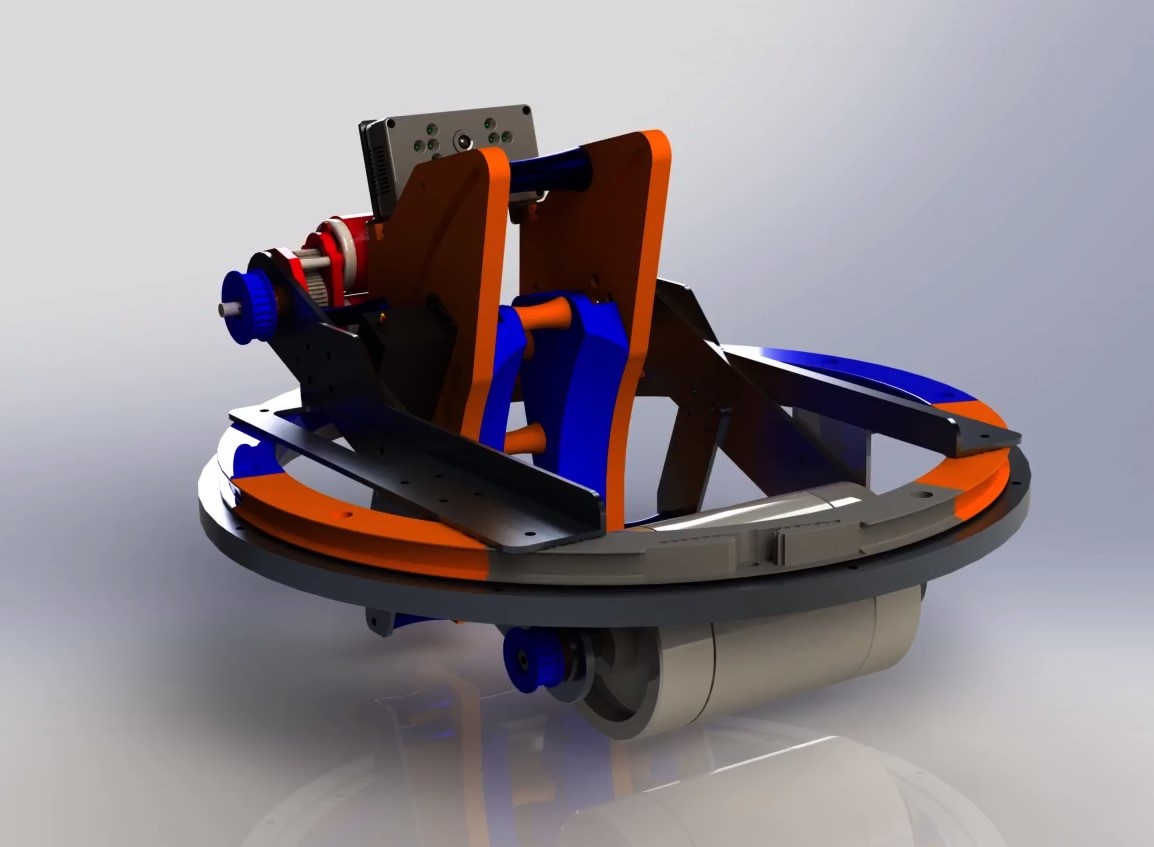
Shooter Personal Contributions
- Aided with prototyping and component layout design
- 40’ max range
- 330 degrees of rotation
- Automatic trajectory control
- 3D printed adjustable exit angle
- Driven by 775 Pros motor
- 20lbs flywheel enables rapid firing
After 6 weeks. We compete with other teams in different universities and colleges and during this team, we continue to upgrade our robot until competition ends near May or June. After the season ends, we have outreach events to help out communities around Oakville. We organized and hosted, robotics enrichment events for high school students and during COVID lockdowns, we 3D printed COVID face shield holders for essential workers.